GEOSLAM ZEB-REVO RT
РУЧНАЯ СИСТЕМА СКАНИРОВАНИЯ



{kind=link}
{kind=link}
Description
Описание
ZEB-REVO RT – это легкие и простые в использовании ручные сканеры, которые позволяют быстро создавать 3D-модели, перемещаясь по объекту работ. Сканеры очень мобильны, просты в эксплуатации и могут использоваться любым оператором, не имеющим специальной подготовки. Сканер можно использовать в любой среде, например, сложных и закрытых пространствах, без необходимости использовать ГНСС. Такая технология работы сокращает время съемки до 10 раз по сравнению с традиционными системами сканирования. Ручная система включает в себя сканер, фотокамеру, регистратор данных и аксессуары - все, что нужно для сбора данных в движении.
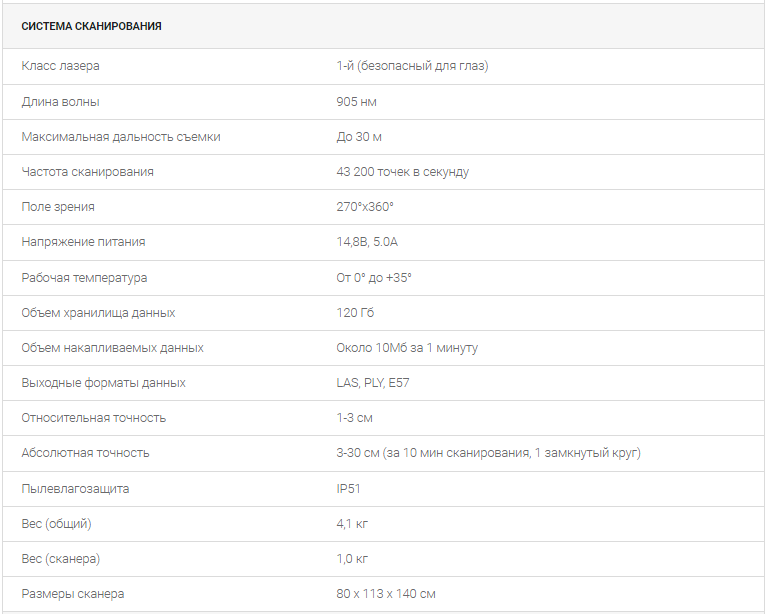
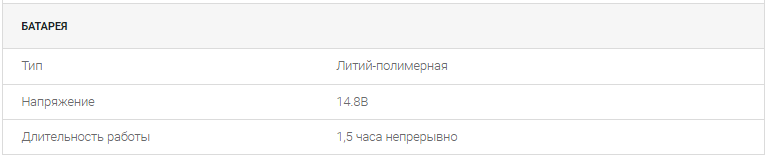
Сбор данных с помощью GeoSlam ZEB-REVO RT так же прост, как обычная прогулка. Просто передвигайтесь по объекту работ, держа устройство в руке, а сканер с дальностью сканирования до 30 м и охватом в 360° будет снимать все окружающее пространство в виде облака точек. Фотокамера, закрепленная рядом со сканером, позволит создать набор фотографий в процессе движения по объекту. Со скоростью до 43200 точек в секунду всего за несколько десятков минут можно выполнить сканирование нескольких этажей небольшого здания, передав данные заказчику по завершении работ.
ZEB-REVO RT легкий – вес сканера всего 1 кг, и простой в работе, его можно переносить вручную, роботах или просто прикреплять к вехе.
Помимо сокращения времени сканирования, с помощью GeoSlam ZEB-REVO RT можно дополнять уже существующие съемки, сделанные наземными сканерами. Программное обеспечение использует алгоритм SLAM и уравнивает данные сканирования без необходимости дополнительного контроля со стороны пользователя, создавая в итоге трехмерное облако точек и синхронизированных с ним фотоизображений.
В комплекте со сканером поставляется GeoSLAM Hub - программное обеспечение для настольного ПК, с помощью которого можно обрабатывать полученные после сканирования облака точек неограниченного объема, выполнять их проверку и привязку, экспорт в различные форматы. Алгоритм SLAM используется для автоматической регистрации данных, полученных с ZEB-REVO RT, для создания облаков точек с привязкой к системе координат. В GeoSLAM Hub полученные изображения и облака точек можно просматривать как в 2D, так и в 3D. Для более крупных проектов можно объединить несколько наборов данных, полученных в разное время. Поскольку алгоритм SLAM не требует данных ГНСС, программное обеспечение может использоваться для обработки данных, полученных как в помещениях, так и вне их. Точная привязка к требуемой системе координат может быть достигнута либо путем сканирования известных точек, либо путем регистрации с существующими облаками точек с уже существующей привязкой.
Для ZEB-REVO RT можно приобрести дополнительные аксессуары, такие как ZEB-CAM -видеокамера с креплением, которая добавляет изображения к данным сканирования. Она легко интегрируется со сканерами ZEB-REVO и ZEB-REVO RT и позволяет просматривать изображения вместе с данными сканирования в GeoSLAM Hub. Используемая технология обеспечивает точное совмещение полученных изображений и облака точек.
Технические характеристики